
进入本世纪以来,航天技术的发展出现了两个趋势:一是单个航天器的能力越来越强,如空天飞机、空间站和复杂大卫星等;二是为弥补单颗航天器经济风险大、可利用空间基线短等先天不足,由多颗小型航天器在轨构成协同航天系统,完成“单兵”作战无法胜任的工作。
基于微小卫星和伴随飞行技术的协同航天系统就是利用一颗微小卫星对主星开展空间操作,或多颗微小型航天器在轨配合形成网络化、自主化的系统,通过保持一定的空间构型或操作方位,协同工作,发挥整体的作用。
系统论及协同学告诉我们,一事物整体力量的发挥将大于组成整体的个体力量之和,即“1+1>2”;而个体间的信息协同和时空结构组织是整体特性的关键。这对于新兴的协同航天系统也是一样,包括构成该系统的单颗微小卫星的协同能力以及空间构型的形成与保持。
方兴未艾的空间协同航天任务
协同航天任务分为两类:一是利用微小卫星对主星的伴随飞行执行空间操作,二是利用多颗微小卫星编队应用――前者突出空间操作,后者偏重联合协同。国际上关于微小伴随卫星的研究始于20世纪80年代末,具有伴随卫星协同航天系统的项目有:以德国为首的Inspector伴随卫星、美国的XSS飞行器、轨道快车、干涉转轮、F6,以及我国“神舟”七号微小伴随卫星。
1997年发射的X-Mir Inspector是世界上第一颗进行空间试验的空间站伴随卫星,进行了为期2天的飞行试验:首先,Inspector卫星从“奋进”号飞船中弹出后围绕“奋进”号舱飞行,并对伴星系统功能进行检验;第二天,Inspector卫星向MIR空间站靠近,围绕它飞行若干圈。
2005年4月在美国范登堡空军基地发射的重约145公斤的XSS-11卫星,具有成像和机动能力,在太空中开展了自主交会试验,其主要应用目标包括近距离检查飞行器状态,以协助地面人员对在轨卫星进行综合诊断、监视空间目标、实现太空飞行器燃料补给操作。
2007年3月8日,美国采取“一箭多星”的方式,将两颗名为“轨道快车”的小型卫星送入轨道。卫星总重量不到1吨,具备很强的机动变轨能力进入其他卫星的运行轨道,同时,具有高度自动化的机械手臂,初步可以替代航天员在太空中完成维修作业任务,甚至具备“太空掳星”能力。
为了提高整星的可靠性,美国国防高级研究计划局提出了F6计划(未来、快速、灵活、分离、自由飞行),即通过多个小卫星编队飞行协同工作构成模块化分离卫星,用化整为零的方式和较小的代价实现大型、巨型卫星的建造和运营,提高卫星的生存能力。尤其当卫星受到人为攻击或自然因素破坏时,不至于导致“全星覆没”,包括用新的卫星模块取代原来的模块利于个别卫星受损或失效后快速重构和功能升级。
为了获得全球的数字高程模型(DEM),法国空间研究中心(CNES)在天文观测任务中计划采用干涉转轮任务,即使用三颗同样的小卫星工作于近地轨道:每颗小卫星携带SAR接收装置,其编队整体靠近一个主动雷达,其间的距离约数十到百余千米――编队卫星接收主动雷达的散射回波,编队长度一般为几千米。通过对干涉数据的处理,最终测到的全球高程精度有望达到米级(编队完成全球观测需要一年时间)。

F6系统示意图
2008年9月25日,我国成功发射了“神舟”七号载人飞船。“神舟”七号飞行的主要任务是实施我国航天员第一次空间出舱活动,而由航天员和地面控制在轨释放微小伴随卫星(SZ-7伴星)并开展照相观测和绕飞试验也是这次载人飞行的重要任务。
而立足国内自主创新的SZ-7伴星方案在设计时,采用了国产三结砷化镓太阳电池、锂离子蓄电池,以及液氨推进系统等国内首次在轨应用的新产品、新技术。包括首次采用双焦距一体化设计的可见光相机,可以实现1280×1024×12fps视频拍摄和高压缩比的JPEG2000静态图像/视频压缩方式。SZ-7伴星随飞船入轨后第二天,首次实现了我国在载人航天器上释放微小卫星――SZ-7伴星释放后的20分钟内共获取清晰图像1680幅,首次获得了航天器释放过程和载人飞船在轨飞行全景图像和视频。
期间,SZ-7伴星先后实施了6次绕飞形成轨道控制,首次实现对无源轨道目标的绕飞技术试验,突破了微小卫星轨道机动和对共面目标的接近、绕飞和保持等关键技术,也为载人航天工程后续交会对接任务提供了有益的尝试。
微小卫星协同技术的发展
根据“体重”的大小,重量小于1000公斤的卫星一般被归入小卫星家族,统称微小卫星。按照1000、500、100、10公斤几个档次可以再细分为小型卫星(Small-Sat)、微小卫星(Mini-Sat)、微型卫星(Micro-Sat)和皮纳卫星(Pico/Nano-Sat)。虽然微小卫星属卫星家族里的“小个子”,但其作用不小,可充分利用其自身轻巧灵活、功能密度高、研制成本低等优点,在多个应用领域大显身手。
作为航天新技术的先行者和探路者,在协同航天系统中,微小卫星的自主控制能力、协同操作能力成为了协同航天系统发挥作用的关键。航天器协同技术主要包括三个方面:星间通信、相对测量和网络调度,分别对应着人的耳朵、眼睛和大脑的功能。
●星间通信:卫星之间信息的传输需要建立星间通信链路,常见的UHF频段在为建立空间星型以太网络提供物理层支持的同时,卫星间齐步走的号令(时间同步)也需要利用星间链路实现。
●相对测量:在协同系统中,卫星首先要保持好队形,特别在一些高要求的协同任务中,如合成孔径观测要求星间同步达到观测波长的量级。在如何互相看齐方面,可以用星间测距或差分GPS等第三方参考为基准,也可以由多颗卫星间的互相观测,即双目或多目测量实现相对位置确定,进一步为相对轨道构型控制保持提供基本依据。
●网络调度:以网络为基础,依据数据的分配、操作的规划需要形成合理有效的协同效果。就像一个团队的管理一样,民主和集中的有效结合(分布式网络计算结合集中式调度管理)是解决协同航天系统控制的关键。
伴随飞行的基本原理
伴随飞行是形成空间协同航天器系统的关键技术。伴随卫星一般都具备一定的轨道机动能力,它往往以某个大型航天器作为服务对象或任务中某个航天器作为任务参考中心(简称主星),与主星按照一定的空间相对构型共同在轨飞行。
卫星在空间的相对构型不是随心所欲的。因为每个卫星还要绕着地球高速飞行,在轨道飞行的同时形成相对稳定的空间构型就如同在飞车上表演叠罗汉的杂技。伴随飞行的实现利用了相对运动的原理:一物体相对另一物体的位置随时间而改变,则称此物体相对另一物体发生了运动;如果相互之间的位置并不随时间而改变,则此物体即在相对静止状态之中。因此,静止与运动两者都是相对的概念,与选定的参照物有关。
以地球为参照物,会发现两个航天器各自绕地球的运动,运行轨道是在地球引力作用下的开普勒轨道,又可称作绝对轨道;以主航天器为参照物,则会发现伴星相对主星的相对运动,伴随轨道是伴随卫星相对主航天器的轨道,又可称作相对轨道。卫星绕地球运动是利用卫星和地球间万有引力产生的;而卫星间的相对运动没有直接的动力学联系。
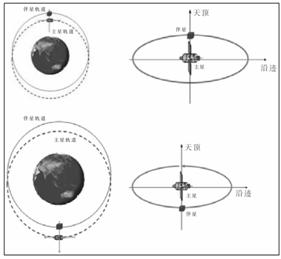
伴星与主航天器的绝对轨道和相对轨道
在地球轨道平面上,两颗卫星形成“时而上时而下”、“时而前时而后”的轨道运动;投影在主航天器的坐标系上,形成伴星相对主航天器的椭圆伴随运动。而根据伴星相对于主航天器的空间构型,伴随轨道还可以有:伴星在主航天器前或后的串行伴飞方式,伴星在主航天器左右作往复直线运动的钟摆型伴飞方式,以及这几种典型伴飞方式组合形成的空间圆伴飞、空间椭圆伴飞、前后钟摆伴飞等伴飞形式。
伴随轨道可用于航天器间的编队飞行、互相观测、监视和救援等。要形成稳定保持在主星附近的的伴随轨道,必需满足以下条件:锚点
a.伴随卫星和主航天器的轨道周期相同,即半长轴相等;
b.伴随卫星和主航天器轨道要素相差很小,特别是轨道近点角的进退保持一致。
由于轨道摄动和控制误差的影响,要形成理想的伴随飞行还要考虑很多其他因素,采用一些特殊的控制方法。
协同航天系统的应用前景
由于通过近距离全方位的伴随飞行可以实现在轨稳定构型,微小伴随卫星协同航天系统有着广阔的应用前景,已成为国际航天技术发展的热点和趋势之一。主要应用方向包括:
●不辞辛劳的“小护士”在美国“哥伦比亚”号航天飞机发生爆炸事故后,对主航天器在轨故障诊断越来越受到航天界的重视。对于宇航员来讲,在空间站舱外进行故障检测等任务通常是危险的、费时的,包括在空间站上安装的可操纵机械臂其视野及抵达的范围也非常有限。而围绕着空间站自由飞行的伴随卫星能够为各种任务提供可能性和帮助完善大型系统的功能。
在伴随卫星上安装扫描、定向摄像系统及其他检测设备,通过在主航天器附近全方位的伴随飞行(对主航天器长期观察和照料),可以将主航天器在各个不同时间的工作状态“记录在案”,包括测量其表面温度、发现结构损伤、机械故障等,并将监测结果告知航天员和地面站,以便采取应对措施。
●航天员的“好助手”伴随着空间站的发展,航天员在空间站上的居住时间将越来越长。据报道,用于故障排除、空间站的维修和保养,占用了空间站上航天员约80%的时间。而如果在伴随卫星上安装机械手,就能实现对空间站的直接维修。比如,在空间站伴随卫星上安装扫描、定向摄像系统及其他检测设备,可以提供有益的维修信息,与航天员、机械臂构成有力的维修支撑系统,缩短故障排除和维修的时间,甚至在航天员不出舱的情况下完成故障的排除和维修。
此外,空间站进行交会对接或组装空间站复合体时,伴随卫星也可起导航和参与组装的作用,成为宇航员的“好助手”。
●分工协作的“空间团队” 单个航天器的尺寸是有限的,而伴随卫星形成编队构型后相互间距离可以在大范围(从几十米到几十千米)内任意选择,由此构成的协同航天系统可以进行某些大尺寸的协同实验,例如电子侦察、虚拟卫星技术研究以及空间环境参数的梯度测量、气象立体观察,等等。
因此,微小卫星伴随飞行技术的协同航天系统不仅可以为大型航天器的工作状态提供监测,拓展航天员的观察视野和操作手段,还可以延伸和拓展航天器的功能并成为空间科学试验与应用的新型平台。
当然,协同航天系统还处在技术试验的“幼年”阶段,还有许多理论问题有待突破,有许多工程问题要解决。也许将来的某一天,这些关键技术的突破就是某一位年轻的读者。
――――――――――
题图为“神州”七号伴星试验示意图
本文作者陈宏宇来自上海微小卫星工程中心总体技术研究室