长期以来,电动机常用于交通运输领域。由于电动机能够提供清洁的机械驱动力,而且规格多样,因此也广泛应用于泵、压缩机、风扇和自动扶梯等,帮助实现自动化运动。
与电动机相对应的生物——天然肌肉,应用还要广泛得多。人体共有600多块肌肉,它们可以使心脏跳动、调节面部表情或协助运动。通过使用电能、热能或化学能模拟肌肉功能的制动器可以产生运动,帮助实现更多的自动化应用,其用途也将会得到更多的扩展。在2019年7月出版的《科学》杂志中,刊登了三篇有关人造肌肉的论文,三篇论文的作者穆九柯、苑金凯和梅米特·卡尼克(Mehmet Kanik)等分别介绍了新型纤维状人造肌肉,它们充分利用了捻曲和卷曲的几何结构的力学优势。
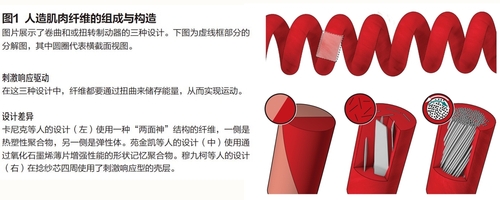
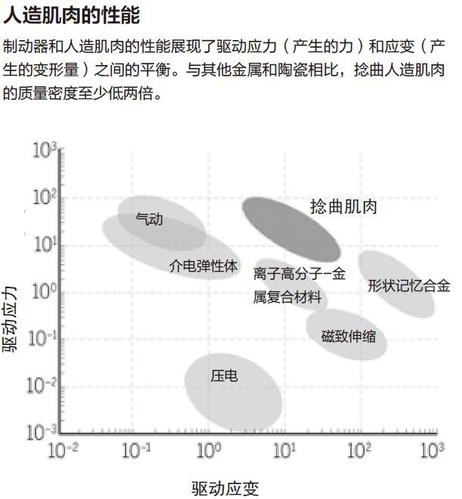
这些纤维状制动器通过调整纤维内的材料成分和结构(见图1),获得了无与伦比的卓越性能。以电、热或化学形式施加的外部刺激会改变材料的微观结构,使其产生大范围运动(应变)和力(应力)(见图2)。这些制动器由轻质聚合物制成,其能量密度为骨骼肌的50倍以上,能够举起高于自身重量1 000余倍的物体。它们都具有类似的捻曲或卷曲形状,可以通过加热来驱动。穆九柯等人和卡尼克等人还使用了自发卷曲的纤维。当受到刺激时,纤维会沿轴向收缩,骨骼肌也会利用收缩来消除肌肉在承受重量时发生屈曲的风险。
穆九柯等人通过选择性地构建一个包裹非能动芯的活性壳层(外层是提供机械能输出的主要部分,而纱芯的纤维在机械能转换过程中贡献甚少),对聚合物纱线的横截面进行调整,以此提高人造肌肉的性能。壳层在外界驱动下扩张膨胀,针对不同的驱动,他们采用多种不同的聚合物作为壳层材料来响应。例如,乙醇蒸汽吸收驱动时采用PEO-SO3(聚环氧乙烷与四氟乙烯和磺酰氟乙烯醚共聚物的混合物)壳层,电热驱动时采用聚氨酯壳层,而电化学驱动时则采用碳纳米管(CNT)壳层。
内芯具有恢复刚度的性能,可以引导纤维进行捻曲运动。穆九柯等人采用多种类型的纱线作为内芯,如捻曲的碳纳米管、聚丙烯腈、丝绸和竹子。与目前使用的鱼线肌肉相比,他们对这些纤维的成分进行了精心调整,仅将对驱动响应的材料置于外部壳层,这种设计由于其他能量扩散到响应材料的路径更短,因此其响应速度也更快。当膨胀力作用于纱线的最外层时,其作用效果更为明显,此时局部纤维的偏斜也最大。这种响应材料分布于壳层的方式使芯纱没有被填充,因此在降低其质量密度的同时提高了其能量密度。结果表明,乙醇蒸汽吸收驱动的PEO-SO3壳层肌肉的功密度可达2.12千焦/千克,而电热驱动的聚氨酯壳层肌肉的功密度可达1.33千焦/千克。
穆九柯等人的纤维设计触及到了未曾探索的领域,在提高人造肌肉性能的同时,也降低了它们的成本。纤维芯本质上可采用任何具有高扭曲刚度和高强度重量比的商用纱线,如竹纤维或尼龙纤维,而驱动响应材料只用于外部薄的壳层。只需在尼龙纱线周围包裹一层较昂贵的碳纳米管,就可以实现电化学驱动,这种驱动可能比受限于卡诺循环的热驱动更节能。
苑金凯等人还利用捻曲纳米复合纤维设计了高性能微发动机。他们以分散性氧化石墨烯薄片填充的聚乙烯醇(PVA)为基质,合成了这种纤维。PVA是一种形状记忆聚合物(SMP),可以在高温下编程至一定形状(高度捻曲结构),然后在捻曲形状固定时进行热淬火处理。当再次加热至略高于编程温度时,捻曲的纤维可做迅速解捻的机械运动,恢复其直线形状。
在纤维中添加5%的氧化石墨烯薄片,就能大大提高发动机的性能,因为氧化石墨烯薄片能够提高刚度,使纤维具有更高的扭矩并有助于解捻。氧化石墨烯薄片的几何形状对提高性能至关重要,因为它们须在纤维内部大幅弯曲、折叠和捻曲,以便在捻曲编程步骤中存储大量弹性能量。此外,氧化石墨烯薄片能够提供临界强度和韧性,可将更多的机械能在纤维断裂之前储存在纤维内。此前,波林(Poulin)与其同事曾对纳米复合PVA纤维的优异韧性进行研究,并发现了这种增强性能。
制备工艺采用纳米颗粒分散和湿纺技术。这种热驱动的纳米复合形状记忆聚合物纤维的功密度达到创纪录的2.8 千焦/千克,可以手动重新编程,并在失效前至少使用10次。这种制动器可以连接至一个弹性纱线核心,以提供一个复原扭矩,使它可以像人造肌肉一样重复驱动。
卡尼克等人通过机械拉伸大型非均相聚合物钢锭,制作了一种类似于两面神结构的人造肌肉纤维。这种纤维的一侧为环烯烃共聚物弹性体(COCe),另一侧为聚乙烯(PE)。得益于这种两面神横截面,这些肌肉在冷拉伸过程中产生的残余应力的驱动下能够自卷。PE在拉伸过程中发生形变,拉伸速度与外拉伸速度相同,而COCe在拉伸过程中只出现部分形变,同时储存部分弹性能量。在拉伸过程中放松时,纤维就会自发卷曲。由于PE和COCe之间的热机械性能不匹配,导致纤维在受到热刺激时收缩,仅加热至约40℃即可达到7.42 千焦/千克的最大功密度。生产这些纤维的工艺可用于产业化生产。
这三份报告中达到的高能量密度驱动的机理尚不清楚。关键因素是捻曲或卷曲过程中储存的弹性能量,这让人联想到机械弹簧电池(机械弹簧电池受到刺激膨胀后会释放一些在卷绕过程中储存的弹性能量)。所能储存的能量与纤维的韧性有关,这三种纤维的非均质成分都有助于增强断裂韧性,受刺激后释放的能量也与这些纤维的膨胀量和膨胀过程中弹性模量的变化有关。
通过这三项研究,我们可以一窥这些材料在未来自动化进程中的前景。穆九柯等人介绍,当用这类纤维制成的织物受到刺激时,它们可以膨胀并改变孔隙度,这种织物可用于响应各种刺激,如血糖测量,适用于医学应用。在苑金凯等人的研究中,他们用纤维推动了一艘小船。由此我们发现,这些纤维在未来可被用于推动微型“游泳运动员”,尤其是考虑到它们与细菌的鞭毛具有相似性。卡尼克等人使用喷在纤维上的纳米线网格,通过压阻效应来测量纤维的收缩,使反馈控制能够精确地驱动这些肌肉。
尽管这三种纤维制动器都具有极高的能量密度,但其能量效率极低,通常都小于6%。即便效率如此之低,它们仍可用于驱动小型机器人、给药系统,或用于无需大量机械工作的变形结构。与自然骨骼系统一样,纤维制动器采用铰链结构或铰接结构,具有复杂的运动学特性。从长远来看,这些人造肌肉可能非常适合于环境敏感的变形结构和动力材料,这需要新的高能效设计。
资料来源 Science