汽车作为一种交通工具有三大核心目标:安全、舒适、便利,而这三大目标的实现都离不开智慧汽车的概念,智慧汽车就是通过借助电子技术和车联网技术,更加安全、更加环保、更加便利地来实现无人驾驶的终极目标。以整车厂、知名IT企业、零部件供应商为首的三股势力均积极投入了这块目前还处于无序竞争的蓝海。

BOSCH无人驾驶汽车
智慧汽车是近几年才出现的名词,以前人们谈到的是智能汽车或者汽车的智能化,随着电子技术和互联网技术的发展,才逐渐提出智慧汽车的概念。智慧汽车的概念从广义上可以指汽车上某个零部件的智能化,如智能大灯、智能雨刮、车道偏离提醒等;从狭义上讲智慧汽车就是具有人类智慧的完全无人驾驶的汽车。
智慧汽车是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。目前对智慧汽车的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智慧汽车己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。
智慧汽车的起源
自从发明汽车的那一天起,汽车的智能化就一直伴随着汽车的整个发展史。从最初的自动启动的实现到最终的完全无人驾驶,汽车智能化一直围绕着安全、舒适、方便三大主题不断进步和发展。主要的历史事件包括:1912年凯迪拉克的自动启动系统意味着驾驶人不再用手动曲柄启动汽车;1939年奥兹莫比尔公司推出了第一个自动变速系统;1958年克莱斯勒的巡航控制系统使得驾驶人不用再时时注意行驶速度;1970年克莱斯勒Imperial首先配备防抱死刹车系统;1997年部分丰田车配备基于雷达的自适应巡航控制,可与前车自动保持安全驾驶距离;2002年丰田推出Night View(夜视),一款车内监视器,可显示前方道路的近红外图像,凸显障碍;2003年梅赛德斯推出Pre-Safe系统,采用感应器预测迫在眉睫的撞击,采取各种防范措施;2004年英菲尼迪(日本豪华车品牌)推出第一款“离开车道”警示系统,在车驶离车道时提醒驾驶人;2005年沃尔沃推出第一款盲点警报系统,当有车进入驾驶人盲点时就会发出警报;2006年雷克萨斯推出相机-声纳辅助的平行泊车系统;2007年卡内基梅隆大学的Tartan车队赢得美国国防部的自动汽车比赛大奖;2008年梅赛德斯引进Attention Assist,在驾驶人显露疲劳征兆时发出警告;2010年奥迪无人驾驶自动汽车TTS行驶12.42公里,抵达落基山派克峰顶;2010年7辆车组成的谷歌无人驾驶汽车车队开始在加州道路上试行;2010年梅赛德斯F800 Style概念车展示赛车助手,一款低速适应巡航控制系统;2011年中国国防科技大学创造的一辆无人驾驶汽车行驶177英里,从长沙开至武汉。
通用汽车公司的阿兰·陶伯估计,2020年自动驾驶系统将成为汽车标准配置。根据世界电气和电子工程师协会(IEEE)预测,至2040年,道路行驶的汽车中无人驾驶汽车将占75%以上。
智慧汽车基本结构
智慧汽车是一个复杂的系统,它主要由四部分构成:智能传感系统、智能计算机系统、辅助驾驶系统、智能公交系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。
智能传感系统:通过在汽车各部件上安装智能传感器,智能传感器把周边环境的信息传递给智能计算机,计算机对信息进行综合整理后把执行信号传递给汽车部件,从而使其作出相应的动作,这就构成了智能传感系统。智能传感系统的核心是传感器,传感器的使用等于为车辆添加了电子眼,如同人类的五官,进一步丰富了车辆对外感知行为。对于车载系统来讲,大部分传感器都是用来监控车辆行驶控制、驾驶员行为、安全、车距及驾驶员与成员舒适度等。
辅助驾驶系统:碰撞避免系统、巡航控制系统、导航系统、通讯系统、驾驶员视觉增强系统。
碰撞避免系统:碰撞避免系统是车辆主动辅助驾驶系统和车辆必要的安全系统,通过对妨碍物、危险态势的及时检测,为驾驶员和车辆系统获得足够的安全时间,从而阻止或减少危险情况的发生,达到安全行车的目的。
巡航控制系统:车辆巡航控制系统就是在计算机精确控制下调整车辆节气门,从而达到在不同路况下始终保持设定车速的辅助驾驶系统。
导航系统:智能车辆一个基本要求就是能为驾驶员找到一条最经济、安全、可靠的交通线路。导航系统是智能车辆必不可少的一部分。导航地图存储在导航计算机中。
智能计算机系统:智能计算机系统是整个智能系统的核心,所有的智能系统都是围绕着它才能发挥作用。智能车辆要想安全、稳定地正常行驶,就要求计算机能够迅速高效地融合整理各个系统传来的大量的信息,并迅速地给出策略,然后精确地传递给发出信号的系统,使其产生相应的动作,来调整汽车,使汽车自动驾驶。
智能公交系统:该系统用于提高交通的可靠性、安全性及生产效率,创建绿色交通,增强交通系统对用户的吸引力。该系统将交通管理部门同驾驶员直接连接起来,进行实时调度和线路调整,降低运输成本,提高运输效率。先进的交通系统是未来智能交通系统中最为实用的社会性系统。
智慧汽车正是有了这些系统的共同作用,从而使得汽车不需要人去驾驶,人只需舒服地坐在车上享受这高科技的成果就行了。
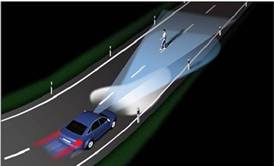
Night view夜视系统
智慧汽车发展趋势
在这一新兴战场,主要有知名科技公司、传统汽车厂商、知名汽车零部件厂商三股主要势力在角逐,目前智慧汽车正处在无序竞争状态,每家都在利用各自的优势跑马圈地。
知名IT企业,以谷歌和苹果公司为代表。谷歌于2009年启动对无人驾驶技术的研究。通过安装了24个传感器的雷克萨斯RX450h汽车,谷歌已完成了约70万英里的无人驾驶里程。谷歌公司还宣布了其无人驾驶汽车项目的最新进展,称已可以在城市道路上行驶。相对于最初的高速公路行驶,城市道路被视作一项更复杂的挑战。
在过去数年间,谷歌已经将这项技术在包括丰田普锐斯及奥迪TT在内的数个车型上展开实验。在16万英里的行驶距离中,有超过1 000英里实现了自动行驶。一旦将此项技术与谷歌地图结合,前景必将十分广阔。
另一股不容忽视的势力――苹果,正试图融入所谓的“汽车梦”。苹果在全球开发者大会(WWDC)上公布了其“iOS in the Car”项目,即将Siri等技术融入到更多的汽车中去;近日,苹果终于发布了更名为“CarPlay”的计划,福特、沃尔沃、法拉利等也在这个联盟中。
传统车企的代表则是诸如福特汽车等。作为先知先觉者,福特早在2007年就与微软合作开发名为SYNC的声控技术,具备影音播放、拨打电话、语音朗读短信等基本功能。目前,该技术已在福特的汽车上得到广泛应用。而为了打造繁荣的生态,福特2010年推出了SYNC AppLink开放接口,智能设备上的第三方应用得以移植过来,与CarPlay不同,SYNC允许第三方应用的接入;福特的SYNC AppLink技术平台,是把AppLink后面的源代码都开源给第三方应用开发者甚至其他汽车厂商。福特实现无人驾驶的蓝图里,短期目标是通过AppLink将无线网连接到车内,以及自动巡航、自动停车等辅助驾驶的智能系统;中期目标是推出半自动控制驾驶技术,包括驾驶者可控的“自动驾驶技术”和在个别情况下使用的车辆自动编组技术;在此基础上,最后才有可能实现无人驾驶这一最远期的目标。
作为汽车零部件供应商,大陆集团意识到无人驾驶汽车的发展趋势,制定了为整车厂提供无人驾驶前装系统的战略目标,分为三个实施阶段:2016年实现部分自动化驾驶;2020年前实现高度自动化驾驶;2025前实现全自动化驾驶,也就是无人驾驶。
按照从高级辅助驾驶系统升级到自动化驾驶的技术发展路线,大陆集团开始了与全球顶尖IT公司的一系列密切合作:首先,未来的无人驾驶汽车需要车联网的支持,2013年8月,大陆集团与思科公司合作开发了一辆联网概念验证车,采用思科公司的无线网络交换技术,能自动在3G、4G网和其他无线网络之间无缝切换,实时接收交通和导航信息,无线升级更新车载软件,概念验证车还安装了基于云计算的信息娱乐系统。其次,2013年9月大陆集团与IBM公司,联合开发下一代“电子地平线”平台。大陆集团的目标是在整合思科无线网络交换技术、IBM云计算嵌入式系统、HERE地图数据的技术基础上,向全球汽车制造商提供完整的、端到端连接的“电子地平线”解决方案,争取在2020年前实现高度自动化驾驶的战略目标。
当然,汽车最终实现完全无人驾驶还是一个漫长的过程,但是这些智能驾驶的技术,正慢慢往无人驾驶方向发展。
责任编辑 彦 隐