微型机器人应用于临床医学的诊疗,不仅提高了诊断的可靠性、真实性,而且由于微机电系统本身的微小尺寸、高度智能,极大地减少了病人的痛苦。在非结构环境的狭小空间作业,比如,胶囊内窥镜侵入性小、没有毒副作用、具有无创、微创等优点,并可以进行主动控制,或加载成像装置,是今后机器人内窥镜发展的必然趋势。
胶囊机器人内窥镜
微型机器人被认为是21世纪医用机器人领域的尖端技术之一。微型机器人以微传感器与微执行器为主要研究对象,是在微电子技术的基础上发展起来的,融合了硅微加工和精密机械加工等多种微加工技术,并应用现代信息技术构成的微系统。微型机器人最大的特点在于对作业对象和环境几乎不会产生破坏和干扰,在临床医学上,已经成为无创、微创外科诊疗实现的工程技术手段之一。
牵引方式
最近几年内出现的胶囊内窥镜是一种无创被动式内窥镜。它仅有一般鱼肝油胶囊大小的体积,采用无线通信的方式传输图像,可口服而不被人体消化,依靠肠道的蠕动最后由肛门排出体外(胶囊内窥镜在肠道中可实时传输肠道图像)。因为胶囊内窥镜体积小和采用被动式迁移,所以对人体肠道无损伤,测试者无不适感。但是,胶囊诊查装置是被动式,不能在消化道内前后移动,反复检查医生感兴趣的地方,而且在食道内停留的时间很短,在胃内只能看到很小的一部分,在结肠内不能检查褶皱里面的病变,因此,胶囊诊查装置目前只能作为小肠检查的有效手段;另外,胶囊内镜使用纽扣电池,只能保证7~8小时左右的工作时间,因此对于排出时间较长的患者来说,在7~8小时之后就不能进行检查了。
可以看出,被动式胶囊内镜能够无创、微创地进行消化道诊查,但也正是因为被动的工作方式,导致其难以克服的缺点。如何在保持主动可控的前提下,使内窥镜无创、微创地进行检查是20年来机器人内窥镜研究者努力解决的问题。
历来研究的主要难点是肠道内牵引装置和头部转舵机构的设计与制造。由于肠道内特殊的运动环境,导致了轮式、足式等驱动方式的失效,所以研究了尺蠖蠕动、蚯蚓蠕动和螺旋驱动等不同的牵引方式,以期获得与人体腔道这种特殊的非结构环境生理兼容,并在其中能够进行安全有效运动的牵引方式。在这些牵引方式中,研究人员研究了不同种类的驱动器,主要寻找一种安全、可靠、控制方便、体积微小的驱动器。
牵引方式的研究主要集中在螺旋式牵引、蚯蚓仿生牵引和尺蠖仿生牵引等方式上。旋转外场的螺旋推进方式不仅存在着推进力小的问题,而且由于机器人在肠道内的姿态时刻变化,如何保证嵌入机器人身体上的永磁体极化方向和外场方向垂直也需要进一步的研究。
另外,螺旋式牵引在严格的润滑膜形成机制下能够获得理想的牵引能力。但是,在人体这种非结构环境中,存在消化道内壁表面起伏剧烈、肠道柔软易于变形、浮动性大等特点,螺旋牵引能否有效可靠,可能还需要作进一步的深入研究。在松软的非结构环境中,尺蠖虫和蚯蚓却能够行动自如,并且对环境造成较少的破坏,这与医用的环境和目的是基本一致的。

胶囊内窥镜

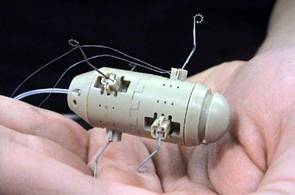
多节仿蚯蚓蠕动机器人
尺蠖仿生结构最早应用于工业管道机器人上,并获得了成功应用。由于工业管道和人体腔道的部分相似性,将其引入人体消化道检测似乎顺理成章,然而,将工业管道中的尺蠖机器人直接应用于临床消化道检测是绝不能成功的。尺蠖仿生结构的特点是总有一节运动单元以某种方式支撑在运动表面上,其他节在身体纵向上可能伸长或者缩短。尺蠖运动是以能够泊位在运动表面为基础的,没有这种能力就不能前进。因此,尺蠖仿生运动的泊位能力非常关键。
在工业管道中,管道基本上都是刚性的,机器人仅可以以某种方式压紧管道以获得足够的摩擦力来提高泊位能力。但是,在人体腔道中,肠道组织却是一种柔软的、易于发生大变形的、表面摩擦系数极小的粘弹性生物组织。机器人变形小,则产生的摩擦力小,运动时会打滑;机器人变形大,可能会超过消化道组织的生理耐受极限,极可能引发医疗事故。
支撑方式
基于此,以往的研究者主要探讨了三种支撑方式。第一种为气囊式,气囊具有一定的柔性,但是存在变形量大会引起肠道组织的破损;第二种为机械式,机构外形几乎不发生变化,控制类似钳子的运动结构交替支撑在肠壁上来实现尺蠖牵引,但会对肠道内壁产生一定的损伤;第三种为吸附式,使用抽真空方法将肠壁吸附在驱动器表面。由于肠壁存在绒毛,因此吸附力量比较小。
与尺蠖牵引方式的研究相比,蚯蚓仿生牵引方式研究的报道较少。历来的研究多集中于机器人在橡胶表面、木材表面、玻璃表面上的实验研究,对于其内在的运动与力的关系很少作过深入的研究。显然,协调而有效的运动控制缺少这种量化的模型而变得不够严谨。另外,该牵引方式在水平表面运动时,运动有效性对摩擦力不是非常敏感。但是,在爬坡状态时,却极大地依赖于机器人与运动表面的摩擦系数,而不是摩擦力。在人体环境中,坡度是难以避免的,因此在蚯蚓仿生牵引方式中必须提高机器人的爬坡能力。
驱动器的研究主要集中在形状记忆合金驱动、气动、微电动机驱动等方式上。在人体腔道的狭小空间中,这些驱动方式有着共同的特点,即可以进行微型化,但是程度不一,在驱动能力、适用性、实用性等方面也各有特点。形状记忆合金驱动的具有功重比高、驱动力较大、体积微小等特点,适宜于微小空间,是历来研究者经常使用的驱动方式。
气动方式具有一定的柔性,对人体腔道的生理兼容性良好。供气控制装置一般都在体外,通过一根供气管道与进入人体的驱动器连接,不仅可以减小样机体积,而且具有较大的驱动力输出。压电驱动具有体积小、刚度大、位移分辨率及定位精度高、频率响应高、无噪声、易于控制等优点,不足是驱动位移太小和驱动电压大。微电动机(直径≤10mm)驱动方式结构简单、控制方便、效率较高,前提必须将旋转运动转变为直线运动。
人体消化道特殊的运动环境对驱动器的体积提出了严格的限制,直径小、长度小是设计的目标所在。如何在有限的狭小空间内,设计出有效的减速增力机构和运动转换机构,面临着许多优化问题。
综上可见,微型机器人距离临床推广还有不少的问题亟待解决,但这些问题是可以预见解决的,在不久的将来,我们或许可以看到这些小小的忙碌在临床上的蠕虫样装置。它的出现会开创无创介入胃肠道的新纪元,届时,胃肠道的低侵袭检查将易于实现。这项技术将有助于胃肠道恶性肿瘤的早期发现、早期治疗,改变胃肠道恶性肿瘤致死率居高不下的格局。
本文作者王坤东来自上海交通大学仪器科学与工程系
责任编辑 则 鸣